Evaluación de las emociones de usuarios en tareas con realimentación háptica utilizado el dispositivo Emotiv Insight
DOI:
https://doi.org/10.17981/ingecuc.15.1.2019.01Palabras clave:
telerobótica, interfaz cerebro computador, robots móviles, control compartido, háptica, EEGResumen
Introducción: Este estudio evalúa las cinco métricas de desempeño, disponibles en el dispositivo Emotiv Insight en una tarea virtual de seguimiento de trayectorias por medio de un robot móvil.
Objetivo: Caracterizar y/o determinar si algunas métricas EEG se relacionan con primitivas de una tarea de tele operación, donde se realimentan señales hápticas, en pro de verificar si puede ser útil incorporar la información disponible del dispositivo Emotiv en una estrategia de control compartido.
Metodología: Se formuló un diseño experimental, que incluye el registro y análisis de neuroseñales en cinco usuarios con una Interfaz Cerebro Computador (ICC), ejecutando tareas de teleoperación de un robot móvil en el entorno de VREP (Virtual Robot Experimentation Platform).
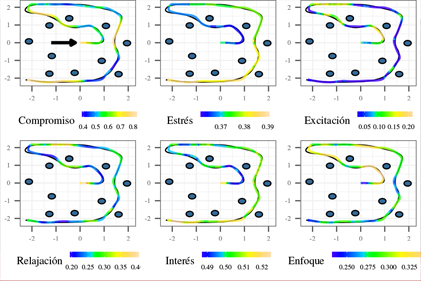
Resultados: Los resultados muestran que el compromiso y la relajación son emociones que podrían ser de utilidad para identificar situaciones demandantes en tareas de seguimiento y evasión de obstáculos. Por otro lado, se observa que algunas métricas como estrés, excitación, interés y enfoque, en promedio, se mantienen en niveles similares durante la ejecución de la tarea.
Conclusiones: Incluir interfaces cerebro computador de bajo costo, como el Emotiv en tareas con realimentación háptica, ofrece nuevas posibilidades para la evaluación del desempeño del usuario y potencialmente para control.
Descargas
Citas
C. Passenberg, A. Glaser, and A. Peer, “Exploring the Design Space of Haptic Assistants: The Assistance Policy Module”, IEEE Transactions on Haptics, vol. 6, no. 4, pp. 440-452, Oct. 2013. [Online . https://doi.org/10.1109/TOH.2013.34
K. Holewa and A. Nawrocka, “Emotiv EPOC neuroheadset in brain-computer interface”, Proceedings of the 2014 15th International Carpathian Control Conference (ICCC). pp. 149–152, May. 2014. https://doi.org/10.1109/CarpathianCC.2014.6843587
G. S. Taylor and C. Schmidt, “Empirical Evaluation of the Emotiv EPOC BCI Headset for the Detection of Mental Actions”, Proceedings of the Human Factors and Ergonomics Society Annual Meeting, vol. 56, no. 1, pp. 193–197, Sep. 2012. https://doi.org/10.1177/1071181312561017
R. Lievesley, M. Wozencroft and D. Ewins, “The Emotiv EPOC neuroheadset: an inexpensive method of controlling assistive technologies using facial expressions and thoughts?”, Journal of Assistive Technologies, vol. 5, no. 2, pp. 67–82, Jun. 2011. https://doi.org/10.1108/17549451111149278
R. Maskeliunas, R. Damasevicius, Martisius and M. Vasiljevas, “Consumer-grade EEG devices: are they usable for control tasks?”, PeerJ 4, e1746, Mar. 2016. https://doi.org/10.7717/peerj.1746
C.-L. Lin, F.-Z. Shaw, K.-Y. Young, C.-T. Lin and T.-P. Jung, “EEG correlates of haptic feedback in a visuomotor tracking task”, NeuroImage, vol. 60, no. 4, pp. 2258–2273, May. 2012. https://doi.org/10.1016/j.neuroimage.2012.02.008
M. Grunwald, T. Weiss, W. Krause, L. Beyer, R. Rost, I. Gutberlet and H.-J. Gertz, “Power of theta waves in the EEG of human subjects increases during recall of haptic information”, Neuroscience Letters, vol. 260, no. 3, pp. 189–192, Feb. 1999. https://doi.org/10.1016/S0304-3940(98)00990-2
H. Miura, J. Kimura, N. Matsuda, M. Soga and H, Taki, “Classification of Haptic Tasks based on Electroencephalogram Frequency Analysis”, Procedia Computer Science, vol. 35, Supplement (C), pp. 1270–1277, Jan. 2014. https://doi.org/10.1016/j.procs.2014.08.226
W. Jia, Y. Luo, Y. Hu and J. Zhang, “Adaptive Force Control Tasks Have Far-Transfer Effect on Sustained Attention”, 9th International Conference on Intelligent Human-Machine Systems and Cybernetics (IHMSC), vol. 2, pp. 212–217. Aug. 2017. https://doi.org/10.1109/IHMSC.2017.162
T. Palomaki, “EEG-based brain-computer interface with visual and haptic feedback”, Master’s thesis, Helsinki University of Technology, 2007. Available: http://lib.tkk.fi/Dipl/2007/urn007655.pdf
A. Chatterjee, V. Aggarwal, A. Ramos, S. Acharya, N. V. Thakor, “Operation of a Brain-Computer Interface Using Vibrotactile Biofeedback”, 3rd International IEEE/EMBS Conference on Neural Engineering. pp. 171–174, May. 2007. https://doi.org/10.1109/CNE.2007.369639
L. George, M. Marchal, L. Glondu and A. Lecuyer, “Combining Brain-Computer Interfaces and Haptics: Detecting Mental Workload to Adapt Haptic Assistance”, Haptics: Perception, Devices, Mobility, and Communication. Springer, Berlin, Heidelberg, pp. 124–135, Jun. 2012. https://doi.org/10.1007/978-3-642-31401-8_12
M. A. Benloucif, C. Sentouh, J. Floris, P. Simon and J. C. Popieul, “Online adaptation of the Level of Haptic Authority in a lane keeping system considering the driver’s state”, Transportation Research Part F: Traffic Psychology and Behaviour, In press, Sep. 2017. https://doi.org/10.1016/j.trf.2017.08.013
E. Rohmer, S. P. N. Singh and M. Freese, “V-REP: A versatile and scalable robot simulation framework”, IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 1321–1326, Nov. 2013. https://doi.org/10.1109/IROS.2013.6696520
F. Conti, F. Barbagli, R. Balaniuk, M. Halg, C. Lu, D. Morris, L. Sentis, J. Warren, O. Khatib and K. Salisbury, “The CHAI libraries”, Proceedings of Eurohaptics 2003, Dublin, Ireland, pp. 496–500, 2003.
D. J. Block, M. B. Michelotti and R. S. Sreenivas, “Application of the Novint Falcon haptic device as an actuator in real-time control”, Paladyn, Journal of Behavioral Robotics, vol. 4, no. 3, 182–193, Dec. 2013. https://doi.org/10.2478/pjbr-2013-0017
Publicado
Cómo citar
Número
Sección
Licencia
Derechos de autor 2019 INGE CUC

Esta obra está bajo una licencia internacional Creative Commons Atribución-NoComercial-SinDerivadas 4.0.
Los artículos publicados son de exclusiva responsabilidad de sus autores y no reflejan necesariamente las opiniones del comité editorial.
La Revista INGE CUC respeta los derechos morales de sus autores, los cuales ceden al comité editorial los derechos patrimoniales del material publicado. A su vez, los autores informan que el presente trabajo es inédito y no ha sido publicado anteriormente.
Todos los artículos están bajo una Licencia Creative Commons Atribución-NoComercial-SinDerivadas 4.0 Internacional.

 English
English
 Español (España)
Español (España)