Assessment of the users emotions in haptic feedback tasks using the Emotiv Insight device
DOI:
https://doi.org/10.17981/ingecuc.15.1.2019.01Keywords:
telerobotics, brain computer interface, mobile robots, shared control, haptics, EEGAbstract
Introduction: This study assesses the five-performance metrics, available on the Emotive Insight device in a virtual toolpath tracking task through a mobile robot.
Objective: Characterize and/or determine if some EEG metrics are related to primitives of a teleoperation task, where haptic feedback is provided, in order to verify if it can be useful to incorporate the information available from the Emotiv device in a shared control strategy.
Methodology: An experimental design was formulated, which includes the recording and analysis of neurosigns in five users with a Brain Computer Interface (BCI), executing tasks of teleoperation of a mobile robot in the Environment of VREP (Virtual Robot Experimentation Platform).
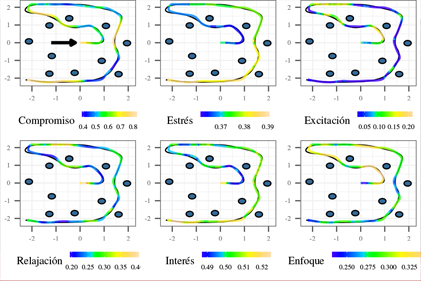
Results: The results show that engagement and relaxation are emotions that could be useful to identify demanding situations in tracking path and evasion of obstacles such as the experimental setup proposed in this article. On the other hand, it is observed that some metrics such as stress, excitement, interest, and focus, on average, remain at similar levels during the task execution.
Conclusions: Including brain-computer interfaces of low-cost, such as the Emotiv in tasks with haptic feedback, offers new possibilities for assessment user performance and potential for control applications.
Downloads
References
C. Passenberg, A. Glaser, and A. Peer, “Exploring the Design Space of Haptic Assistants: The Assistance Policy Module”, IEEE Transactions on Haptics, vol. 6, no. 4, pp. 440-452, Oct. 2013. [Online . https://doi.org/10.1109/TOH.2013.34
K. Holewa and A. Nawrocka, “Emotiv EPOC neuroheadset in brain-computer interface”, Proceedings of the 2014 15th International Carpathian Control Conference (ICCC). pp. 149–152, May. 2014. https://doi.org/10.1109/CarpathianCC.2014.6843587
G. S. Taylor and C. Schmidt, “Empirical Evaluation of the Emotiv EPOC BCI Headset for the Detection of Mental Actions”, Proceedings of the Human Factors and Ergonomics Society Annual Meeting, vol. 56, no. 1, pp. 193–197, Sep. 2012. https://doi.org/10.1177/1071181312561017
R. Lievesley, M. Wozencroft and D. Ewins, “The Emotiv EPOC neuroheadset: an inexpensive method of controlling assistive technologies using facial expressions and thoughts?”, Journal of Assistive Technologies, vol. 5, no. 2, pp. 67–82, Jun. 2011. https://doi.org/10.1108/17549451111149278
R. Maskeliunas, R. Damasevicius, Martisius and M. Vasiljevas, “Consumer-grade EEG devices: are they usable for control tasks?”, PeerJ 4, e1746, Mar. 2016. https://doi.org/10.7717/peerj.1746
C.-L. Lin, F.-Z. Shaw, K.-Y. Young, C.-T. Lin and T.-P. Jung, “EEG correlates of haptic feedback in a visuomotor tracking task”, NeuroImage, vol. 60, no. 4, pp. 2258–2273, May. 2012. https://doi.org/10.1016/j.neuroimage.2012.02.008
M. Grunwald, T. Weiss, W. Krause, L. Beyer, R. Rost, I. Gutberlet and H.-J. Gertz, “Power of theta waves in the EEG of human subjects increases during recall of haptic information”, Neuroscience Letters, vol. 260, no. 3, pp. 189–192, Feb. 1999. https://doi.org/10.1016/S0304-3940(98)00990-2
H. Miura, J. Kimura, N. Matsuda, M. Soga and H, Taki, “Classification of Haptic Tasks based on Electroencephalogram Frequency Analysis”, Procedia Computer Science, vol. 35, Supplement (C), pp. 1270–1277, Jan. 2014. https://doi.org/10.1016/j.procs.2014.08.226
W. Jia, Y. Luo, Y. Hu and J. Zhang, “Adaptive Force Control Tasks Have Far-Transfer Effect on Sustained Attention”, 9th International Conference on Intelligent Human-Machine Systems and Cybernetics (IHMSC), vol. 2, pp. 212–217. Aug. 2017. https://doi.org/10.1109/IHMSC.2017.162
T. Palomaki, “EEG-based brain-computer interface with visual and haptic feedback”, Master’s thesis, Helsinki University of Technology, 2007. Available: http://lib.tkk.fi/Dipl/2007/urn007655.pdf
A. Chatterjee, V. Aggarwal, A. Ramos, S. Acharya, N. V. Thakor, “Operation of a Brain-Computer Interface Using Vibrotactile Biofeedback”, 3rd International IEEE/EMBS Conference on Neural Engineering. pp. 171–174, May. 2007. https://doi.org/10.1109/CNE.2007.369639
L. George, M. Marchal, L. Glondu and A. Lecuyer, “Combining Brain-Computer Interfaces and Haptics: Detecting Mental Workload to Adapt Haptic Assistance”, Haptics: Perception, Devices, Mobility, and Communication. Springer, Berlin, Heidelberg, pp. 124–135, Jun. 2012. https://doi.org/10.1007/978-3-642-31401-8_12
M. A. Benloucif, C. Sentouh, J. Floris, P. Simon and J. C. Popieul, “Online adaptation of the Level of Haptic Authority in a lane keeping system considering the driver’s state”, Transportation Research Part F: Traffic Psychology and Behaviour, In press, Sep. 2017. https://doi.org/10.1016/j.trf.2017.08.013
E. Rohmer, S. P. N. Singh and M. Freese, “V-REP: A versatile and scalable robot simulation framework”, IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 1321–1326, Nov. 2013. https://doi.org/10.1109/IROS.2013.6696520
F. Conti, F. Barbagli, R. Balaniuk, M. Halg, C. Lu, D. Morris, L. Sentis, J. Warren, O. Khatib and K. Salisbury, “The CHAI libraries”, Proceedings of Eurohaptics 2003, Dublin, Ireland, pp. 496–500, 2003.
D. J. Block, M. B. Michelotti and R. S. Sreenivas, “Application of the Novint Falcon haptic device as an actuator in real-time control”, Paladyn, Journal of Behavioral Robotics, vol. 4, no. 3, 182–193, Dec. 2013. https://doi.org/10.2478/pjbr-2013-0017
Published
How to Cite
Issue
Section
License
Copyright (c) 2019 INGE CUC

This work is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License.
Published papers are the exclusive responsibility of their authors and do not necessary reflect the opinions of the editorial committee.
INGE CUC Journal respects the moral rights of its authors, whom must cede the editorial committee the patrimonial rights of the published material. In turn, the authors inform that the current work is unpublished and has not been previously published.
All articles are licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License.

 English
English
 Español (España)
Español (España)