Force Sensor For Monitoring in the Rehabilitation of Children with Motor Problems in the Upper Limbs
DOI:
https://doi.org/10.17981/ingecuc.19.1.2023.08Keywords:
force sensor, strain gauges, sensor for MIT-MANUS robot, force sensing with Arduino, Maltese cross based force sensingAbstract
Introduction: Robotic rehabilitation devices for motor impairment patients are widely used since they significantly impact the rehabilitation process by offering a uniform exercise plan without typical variations due to different human therapists. These devices require force sensors to monitor the patient recovery evolution. Among the rehabilitation robotic devices is the two degree-of-freedom MIT-MANUS model used in patients with upper limbs motor problems. In order to complement the use of a MIT-MANUS system, it is necessary to equip it with planar sensing forces capability. Unfortunately, commercial devices are very expensive and not very accessible in countries like Colombia. Therefore, the research objective is to develop a force sensor for a robotic MIT-MANUS system that is simple, robust, economical and reliable.
Objective: Develop an in-plane sensing device capable of detecting, with good precision and an acceptable measurement error, the forces exerted by girls and boys up to 10 years of age.
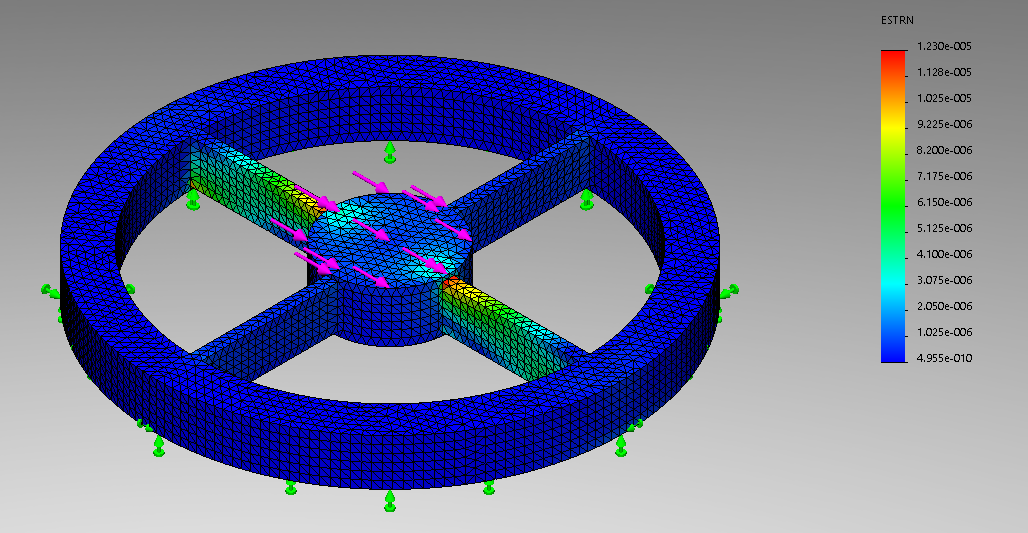
Method: A Mechanical Engineering methodological design approach was used, based on the phases of conception, design, CAE validation, construction, assembly and experimental tests.
Results: The research main result was the construction of an experimentally validated sensing device capable of measuring force up to 60 N in the plane.
Conclusions: After carrying out the tests and experimental trials, it was possible to verify that the sensor is reliable when measuring a force in the plane. The maximum measurement error of a vertical or horizontal force component is 10%, which is reduced to 6% when the resultant force value is calculated. The source of the errors is diverse, due to the non-homogeneity of the metallic element, the type of gauge that was used, the chemicals used to weld the gauge to the mechanical element, ADC conversion problems, among others, but their acceptable values allow using of the gauge in the application initially planned.
Downloads
References
P. Maciejasz, J. Eschweiler, K. Gerlach-Hahn, A. Jansen-Troy & S. Leonhardt, “A survey on robotic devices for upper limb rehabilitation,” J. NeuroEngineering Rehabil., vol. 11, no. 3, pp. 1–29, Jan. 2014. https://doi.org/10.1186/1743-0003-11-3
D. Reinkensmeyer, L. Kahn, M. Averbuch, A. McKenna-Cole, B. Schmit & W. Rymer, “Understanding and treating arm movement impairment after chronic brain injury: Progress with the ARM Guide,” J Rehabil Res Dev, vol. 37, no. 6, pp. 653–662, Nov. 2000. Available from https://www.rehab.research.va.gov/jour/00/37/6/pdf/reinkensmeyer.pdf
S. Masiero, A. Celia, G. Rosati & M. Armani, “Robotic-Assisted Rehabilitation of the Upper Limb After Acute Stroke,” Arch Phys Med Rehabil, vol. 88, no. 2, pp. 142–149, Feb. 2007. https://doi.org/10.1016/j.apmr.2006.10.032
I. Krebs, N. Hogan, M. Aisen & B. Volpe, “Robot-Aided Neurorehabilitation,” IEEE Trans Rehabil Eng, vol. 6, no. 1, pp. 75–87, Mar. 1998. https://doi.org/10.1109/86.662623
T. Nef & R. Reiner, “Three-Dimensional Multi-Degree-of-Freedom Arm Therapy Robot (ARMin),” in Neurorehabilitation Technology, V. Dietz, T. Nef & W. Rymer, Eds., LDN, UK: Springer, pp. 141–157, 2011. https://doi.org/10.1007/978-1-4471-2277-7_9
V. Klamroth-Marganska, J. Blanco, K. Campen, A. Curt, V. Dietz, T. Ettlin, M. Felder, B. Fellinghauer, M. Guidali, A.Kollmar, A. Luft, T. Nef, C. Schuster-Amft, W. Stahel & R. Riener, “Three-dimensional, task-specific robot therapy of the arm after stroke: a multicentre, parallel-group randomised trial,” Lancet Neurol, vol. 13, no. 2, pp. 159–166, Dec. 2013. https://doi.org/10.1016/S1474-4422(13)70305-3
S. Macovei & I. Doroftei, “A short overview of upper limb rehabilitation devices,” IOP Conf Ser Mater Sci Eng, vol 145, no. 5, pp. 1–8, Aug. 2016. https://doi.org/10.1088/1757-899X/145/5/052014
H. Krebs, M. Ferraro, S. Buerger, M. Newbery, A. Makiyama, M. Sandmann, D. Lynch, B. Volpe & N. Hogan, “Rehabilitation robotics: pilot trial of a spatial extension for MIT Manus,” J Neuroeng Rehabilitation, vol. 1, no. 5, pp. 1–15, Oct. 2004. https://doi.org/10.1186/1743-0003-1-5
A. Georgopoulou, S. Michel, B. Vanderborght & F. Clemens, “Piezoresistive sensor fiber composites based on silicone elastomersfor the monitoring of the position of a robot arm,” Sens. Actuator A Phys., vol. 318, pp. 1–11, Nov. 2020. https://doi.org/10.1016/j.sna.2020.112433
M. Melnykowycz, M. Tschudin & F. Clemens, “Piezoresistive Carbon-based Hybrid Sensor for Body-Mounted Biomedical Applications,” IOP Conf. Ser. Mater. Sci. Eng., vol. 175, no. 1, pp. 1–6, Feb. 2017. https://doi.org/10.1088/1757-899X/175/1/012006
T. Okatani & I. Shimoyama, “A tactile sensor for simultaneous measurements of 6-axis force/torque and the coefficient of static friction,” Sens. Actuator A Phys., vol. 315, pp. 1–6, Nov. 2020. https://doi.org/10.1016/j.sna.2020.112362
G. Palli, L. Moriello, U. Scarcia & C. Melchiorri, “An Underwater Robotic Gripper with Embedded Force/TorqueWrist Sensor”, IFAC-PapersOnLine, vol. 50, no. 1, pp. 11209–11214, Jul. 2017. https://doi.org/10.1016/j.ifacol.2017.08.2095
G. Palli, L. Moriello, U. Scarcia & C. Melchiorri, “Development of an optoelectronic 6-axis force/torque sensor for robotic applications,” Sens. Actuator A Phys., vol. 220, pp. 333–346, Dec. 2014. https://doi.org/10.1016/j.sna.2014.09.023
D. Schepper, B. Moyaers, G. Schouterden, K. Kellens & E. Demeester, “Towards robust human-robot mobile co-manipulation for tasks involving the handling of non-rigid materials using sensor-fused force-torque, and skeleton tracking data,” Procedia CIRP, vol. 97, pp. 325–330, May. 2020. https://doi.org/10.1016/j.procir.2020.05.245
C. Yuan, L. Luo, Q. Yuan, J. Wu, R. Yan, H. Kim, K. Kim & C. Han, “Development and evaluation of a compact 6-axis force/moment sensor with a serial structure for the humanoid robot foot,” Meas., vol. 70, pp. 110–122, Jun. 2015. https://doi.org/10.1016/j.measurement.2015.03.027
J. Salazar, “Diseño e implementación de un sensor de fuerza de 6 grados de libertad”, Projecte Final de Màster Oficial, Dep. Engi. Sistem. Automatic. Informatic. Ind., UPC, BAR, ES, 2011. Disponible en http://hdl.handle.net/2099.1/15195
Q. Liang, D. Zhang, Q. Song, Y. Ge, H. Cao & Y. Ge, “Design and fabrication of a six-dimensional wrist force/torque sensor based on E-type membranes compared to cross beams,” Meas, vol. 43, no. 10, pp. 1702–1719, Dec. 2020. https://doi.org/10.1016/j.measurement.2010.09.010
P. Mantenuto, A. de Marcellis & G. Ferri, “On The Sensitivity Characteristics in Novel Automatic Wheatstone Bridge-Based Interfaces,” Proc Eng, vol. 47, pp. 261–264, Sep. 2012. https://doi.org/10.1016/j.proeng.2012.09.133
L. Quynh, B. Tu, D. Dang, D. Viet, L. Hien, D. Giang & N. Duc, “Detection of magnetic nanoparticles using simple AMR sensors in Wheatstone bridge,” J Sci Adv Mater Devices, vol. 1, no. 1, pp. 98–102, Mar. 2016. https://doi.org/10.1016/j.jsamd.2016.04.006
A. Tözeren, Human Body Dynamics: Classical Mechanics and Human Movement. WDC, USA: Springer, 1999. Available in: https://www.sportsbiomech.com/Books/Human%20Body%20Dynamics%20-%20classical%20mechanics%20and%20human%20movement.pdf
Avia Semiconductor, “HX711 - 24-Bit Analog-to-Digital Converter (ADC) for Weigh Scales,” sparkfun, Jun. 26, 2009, [Online . Available from https://cdn.sparkfun.com/datasheets/Sensors/ForceFlex/hx711_english.pdf
Grahamh, “Table of critical values for Pearson's r,” US, Jun. 15, 2009, [Online . Available from http://users.sussex.ac.uk/~grahamh/RM1web/Pearsonstable.pdf
A. Creus, Instrumentación Industrial, 8 ed., BA, ES: Marcombo, 2011.
SolidWorks. (2020). Dassault Systèmes. Disponible en https://www.solidworks.com/es
Published
How to Cite
Issue
Section
License
Copyright (c) 2022 INGE CUC

This work is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License.
Published papers are the exclusive responsibility of their authors and do not necessary reflect the opinions of the editorial committee.
INGE CUC Journal respects the moral rights of its authors, whom must cede the editorial committee the patrimonial rights of the published material. In turn, the authors inform that the current work is unpublished and has not been previously published.
All articles are licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License.

 English
English
 Español (España)
Español (España)