Sensor de Fuerza para el Monitoreo en la Rehabilitación de Niños con Problemas Motrices en los Miembros Superiores
DOI:
https://doi.org/10.17981/ingecuc.19.1.2023.08Palabras clave:
sensor de fuerza, galgas extensiométricas, sensor para robot MIT-MANUS, sensado de fuerzas con Arduino, sensado de fuerzas basados en cruz de maltaResumen
Introducción: Los dispositivos robóticos de rehabilitación de pacientes con impedimentos motrices se encuentran en amplio uso por cuanto impactan significativamente el proceso de rehabilitación al ofrecer un plan uniforme de ejercicios sin tener las variaciones típicas presentes entre diferentes terapeutas humanos. Estos dispositivos requieren de sensores de fuerza para monitorear la evolución en la recuperación del paciente. Dentro de los dispositivos robóticos para rehabilitación se encuentra el MIT-MANUS, el cual posee dos grados de libertad y se emplea en pacientes con problemas motrices en miembros superiores. Para poder complementar el uso de un sistema MIT-MANUS se requiere contar con un dispositivo que sea capaz de sensar fuerzas en el plano. Lastimosamente, los dispositivos comerciales son muy costosos y poco accesibles en países como Colombia. Se plantea por lo tanto el objetivo de investigación de desarrollar un sensor de fuerza para un sistema robótico MIT-MANUS que sea simple, robusto, económico y fiable.
Objetivo: Desarrollar un dispositivo de sensado en el plano que se capaz de detectar, con buena precisión y un error de medición aceptable, las fuerzas ejercidas por niñas y niños de hasta 10 años de edad.
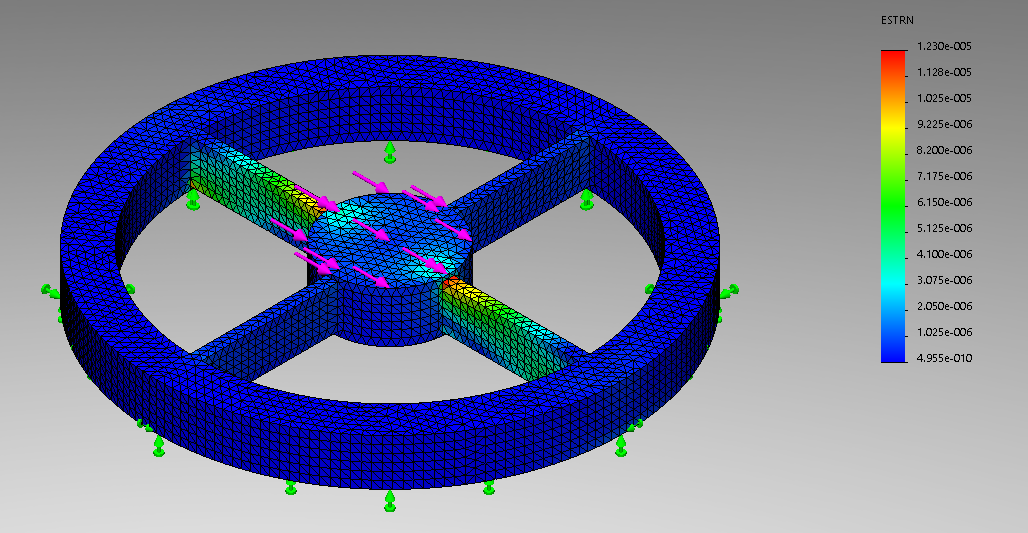
Metodología: Se utilizó un enfoque de diseño metodológico de Ingeniería Mecánica, basado en las fases de concepción, diseño, validación CAE, construcción, ensamble y pruebas experimentales.
Resultados: El principal resultado de la investigación fue la construcción de un dispositivo de sensado validado experimentalmente capaz de medir fuerza en el plano de hasta 60 N.
Conclusiones: Después de realizar las pruebas y ensayos experimentales, se pudo comprobar que el sensor es fiable al momento de medir una fuerza en el plano. El error máximo de medición de una fuerza en su componente horizontal o vertical es del 10%, el cual se reduce al 6% cuando el valor calculado corresponde a la resultante de la fuerza. La fuente de los errores es diversa, ya sea debido a la no homogeneidad del elemento metálico, el tipo de galga usada, los químicos empleados para soldar la galga al elemento mecánico, problemas de conversión ADC, entre otros, pero sus valores aceptables permiten emplear la galga en la aplicación a la que fue diseñada.
Descargas
Citas
P. Maciejasz, J. Eschweiler, K. Gerlach-Hahn, A. Jansen-Troy & S. Leonhardt, “A survey on robotic devices for upper limb rehabilitation,” J. NeuroEngineering Rehabil., vol. 11, no. 3, pp. 1–29, Jan. 2014. https://doi.org/10.1186/1743-0003-11-3
D. Reinkensmeyer, L. Kahn, M. Averbuch, A. McKenna-Cole, B. Schmit & W. Rymer, “Understanding and treating arm movement impairment after chronic brain injury: Progress with the ARM Guide,” J Rehabil Res Dev, vol. 37, no. 6, pp. 653–662, Nov. 2000. Available from https://www.rehab.research.va.gov/jour/00/37/6/pdf/reinkensmeyer.pdf
S. Masiero, A. Celia, G. Rosati & M. Armani, “Robotic-Assisted Rehabilitation of the Upper Limb After Acute Stroke,” Arch Phys Med Rehabil, vol. 88, no. 2, pp. 142–149, Feb. 2007. https://doi.org/10.1016/j.apmr.2006.10.032
I. Krebs, N. Hogan, M. Aisen & B. Volpe, “Robot-Aided Neurorehabilitation,” IEEE Trans Rehabil Eng, vol. 6, no. 1, pp. 75–87, Mar. 1998. https://doi.org/10.1109/86.662623
T. Nef & R. Reiner, “Three-Dimensional Multi-Degree-of-Freedom Arm Therapy Robot (ARMin),” in Neurorehabilitation Technology, V. Dietz, T. Nef & W. Rymer, Eds., LDN, UK: Springer, pp. 141–157, 2011. https://doi.org/10.1007/978-1-4471-2277-7_9
V. Klamroth-Marganska, J. Blanco, K. Campen, A. Curt, V. Dietz, T. Ettlin, M. Felder, B. Fellinghauer, M. Guidali, A.Kollmar, A. Luft, T. Nef, C. Schuster-Amft, W. Stahel & R. Riener, “Three-dimensional, task-specific robot therapy of the arm after stroke: a multicentre, parallel-group randomised trial,” Lancet Neurol, vol. 13, no. 2, pp. 159–166, Dec. 2013. https://doi.org/10.1016/S1474-4422(13)70305-3
S. Macovei & I. Doroftei, “A short overview of upper limb rehabilitation devices,” IOP Conf Ser Mater Sci Eng, vol 145, no. 5, pp. 1–8, Aug. 2016. https://doi.org/10.1088/1757-899X/145/5/052014
H. Krebs, M. Ferraro, S. Buerger, M. Newbery, A. Makiyama, M. Sandmann, D. Lynch, B. Volpe & N. Hogan, “Rehabilitation robotics: pilot trial of a spatial extension for MIT Manus,” J Neuroeng Rehabilitation, vol. 1, no. 5, pp. 1–15, Oct. 2004. https://doi.org/10.1186/1743-0003-1-5
A. Georgopoulou, S. Michel, B. Vanderborght & F. Clemens, “Piezoresistive sensor fiber composites based on silicone elastomersfor the monitoring of the position of a robot arm,” Sens. Actuator A Phys., vol. 318, pp. 1–11, Nov. 2020. https://doi.org/10.1016/j.sna.2020.112433
M. Melnykowycz, M. Tschudin & F. Clemens, “Piezoresistive Carbon-based Hybrid Sensor for Body-Mounted Biomedical Applications,” IOP Conf. Ser. Mater. Sci. Eng., vol. 175, no. 1, pp. 1–6, Feb. 2017. https://doi.org/10.1088/1757-899X/175/1/012006
T. Okatani & I. Shimoyama, “A tactile sensor for simultaneous measurements of 6-axis force/torque and the coefficient of static friction,” Sens. Actuator A Phys., vol. 315, pp. 1–6, Nov. 2020. https://doi.org/10.1016/j.sna.2020.112362
G. Palli, L. Moriello, U. Scarcia & C. Melchiorri, “An Underwater Robotic Gripper with Embedded Force/TorqueWrist Sensor”, IFAC-PapersOnLine, vol. 50, no. 1, pp. 11209–11214, Jul. 2017. https://doi.org/10.1016/j.ifacol.2017.08.2095
G. Palli, L. Moriello, U. Scarcia & C. Melchiorri, “Development of an optoelectronic 6-axis force/torque sensor for robotic applications,” Sens. Actuator A Phys., vol. 220, pp. 333–346, Dec. 2014. https://doi.org/10.1016/j.sna.2014.09.023
D. Schepper, B. Moyaers, G. Schouterden, K. Kellens & E. Demeester, “Towards robust human-robot mobile co-manipulation for tasks involving the handling of non-rigid materials using sensor-fused force-torque, and skeleton tracking data,” Procedia CIRP, vol. 97, pp. 325–330, May. 2020. https://doi.org/10.1016/j.procir.2020.05.245
C. Yuan, L. Luo, Q. Yuan, J. Wu, R. Yan, H. Kim, K. Kim & C. Han, “Development and evaluation of a compact 6-axis force/moment sensor with a serial structure for the humanoid robot foot,” Meas., vol. 70, pp. 110–122, Jun. 2015. https://doi.org/10.1016/j.measurement.2015.03.027
J. Salazar, “Diseño e implementación de un sensor de fuerza de 6 grados de libertad”, Projecte Final de Màster Oficial, Dep. Engi. Sistem. Automatic. Informatic. Ind., UPC, BAR, ES, 2011. Disponible en http://hdl.handle.net/2099.1/15195
Q. Liang, D. Zhang, Q. Song, Y. Ge, H. Cao & Y. Ge, “Design and fabrication of a six-dimensional wrist force/torque sensor based on E-type membranes compared to cross beams,” Meas, vol. 43, no. 10, pp. 1702–1719, Dec. 2020. https://doi.org/10.1016/j.measurement.2010.09.010
P. Mantenuto, A. de Marcellis & G. Ferri, “On The Sensitivity Characteristics in Novel Automatic Wheatstone Bridge-Based Interfaces,” Proc Eng, vol. 47, pp. 261–264, Sep. 2012. https://doi.org/10.1016/j.proeng.2012.09.133
L. Quynh, B. Tu, D. Dang, D. Viet, L. Hien, D. Giang & N. Duc, “Detection of magnetic nanoparticles using simple AMR sensors in Wheatstone bridge,” J Sci Adv Mater Devices, vol. 1, no. 1, pp. 98–102, Mar. 2016. https://doi.org/10.1016/j.jsamd.2016.04.006
A. Tözeren, Human Body Dynamics: Classical Mechanics and Human Movement. WDC, USA: Springer, 1999. Available in: https://www.sportsbiomech.com/Books/Human%20Body%20Dynamics%20-%20classical%20mechanics%20and%20human%20movement.pdf
Avia Semiconductor, “HX711 - 24-Bit Analog-to-Digital Converter (ADC) for Weigh Scales,” sparkfun, Jun. 26, 2009, [Online . Available from https://cdn.sparkfun.com/datasheets/Sensors/ForceFlex/hx711_english.pdf
Grahamh, “Table of critical values for Pearson's r,” US, Jun. 15, 2009, [Online . Available from http://users.sussex.ac.uk/~grahamh/RM1web/Pearsonstable.pdf
A. Creus, Instrumentación Industrial, 8 ed., BA, ES: Marcombo, 2011.
SolidWorks. (2020). Dassault Systèmes. Disponible en https://www.solidworks.com/es
Publicado
Cómo citar
Número
Sección
Licencia
Derechos de autor 2022 INGE CUC

Esta obra está bajo una licencia internacional Creative Commons Atribución-NoComercial-SinDerivadas 4.0.
Los artículos publicados son de exclusiva responsabilidad de sus autores y no reflejan necesariamente las opiniones del comité editorial.
La Revista INGE CUC respeta los derechos morales de sus autores, los cuales ceden al comité editorial los derechos patrimoniales del material publicado. A su vez, los autores informan que el presente trabajo es inédito y no ha sido publicado anteriormente.
Todos los artículos están bajo una Licencia Creative Commons Atribución-NoComercial-SinDerivadas 4.0 Internacional.

 English
English
 Español (España)
Español (España)